
This article is dedicated to the general presentation of the electromagnetic SubDomain Model (SDM) available in MANATEE.
Introduction to the Subdomain Method / Subdomain Model
The SubDomain Method or SubDomain Model (SDM), also called Fourier-based Model or Harmonic Model, is a semi-analytical method which has been intially developed to compute the two-dimensional (radial & tangential) air gap flux density in electrical machines. Other machine characteristics can be deduced from the air gap flux density such as electromagnetic torque, electromotive force, magnetic losses, Maxwell forces for noise and vibrations analysis.
In MANATEE, the subdomain method is available for the following topologies:
- Surface PMSM (tutorial here)
- Surface Inset PMSM
- Interior PMSM (for both open circuit and load conditions, including flux concentration)
- Squirrel Cage Induction Machine (SCIM)
- Doubly-Fed Induction Machine (DFIM)
An accurate and fast method
For the same modeling assumptions, SDM is as accurate as Finite Element Method (FEM) and much faster [[E. Devillers, J. Le Besnerais, T. Lubin, M. Hecquet, and J. P. Lecointe, “A review of subdomain modeling techniques in electrical machines : performances and applications,” in ICEM International Conference on Electrical Machines, 2016.]], which makes it interesting during the first design steps of electrical machines [[T. Lubin, S. Mezani, and A. Rezzoug, “2-D exact analytical model for surface-mounted permanent-magnet motors with semi-closed slots,” IEEE Trans. Magn., vol. 47, no. part 2, pp. 479–492, 2011.]] or to quickly estimate magnetic forces involved in magnetic noise generation [[Z. Q. Zhu, Z. P. Xia, L. J. Wu, and G. W. Jewell, “Analytical modeling and finite-element computation of radial vibration force in fractional-slot permanent-magnet brushless machines,” IEEE Trans. Ind. Appl., vol. 46, no. 5, pp. 1908–1918, 2010.]], [[E. Devillers, M. Hecquet, J. Le Besnerais, and M. Régniez, “Tangential Effects on Magnetic Vibrations and Acoustic Noise of Induction Machines using Subdomain Method and Electromagnetic Vibration Synthesis,” in IEMDC International Electric Machines & Drives Conference, 2017.]].
Three different topologies have been studied to illustrate SDM’s computational efficiency in comparison with FEA, as both methods are included in MANATEE :
- A Surface PMSM with 6 slots/4 poles
- An Inset PMSM with 15 slots / 4 poles
- A SCIM with 36 slots / 28 bars / 4 poles
The finite element mesh is represented as well as the number of periodicity for each topology:
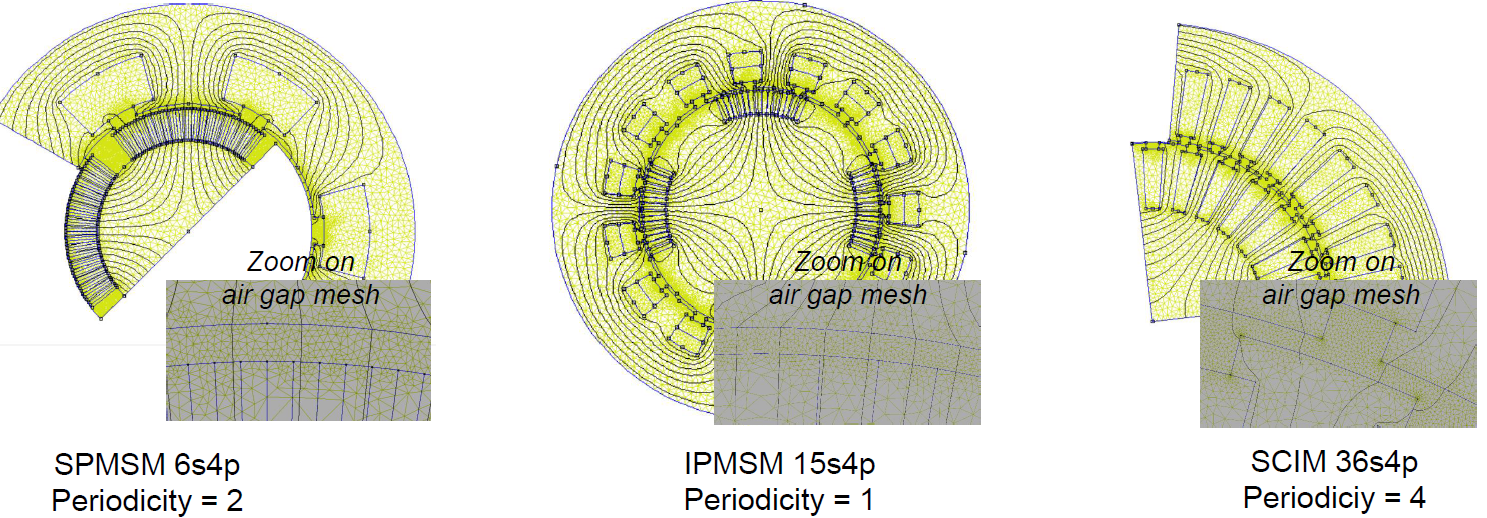
3 machine topologies modelled using SDM and FEA (FEMM) in MANATEE software
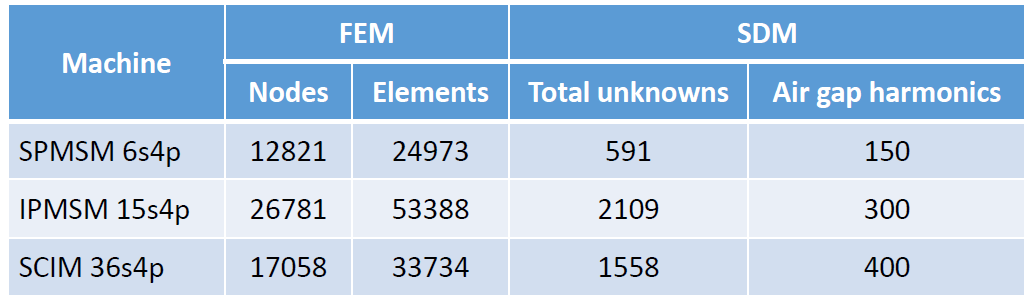
Finite Element mesh properties and air gap harmonic number for the subdomain models
Both elements and air gap harmonics numbers are automatically chosen by MANATEE to optimize the accuracy versus computation time ratio. (See How to set the harmonic number in the different subdomains ?)
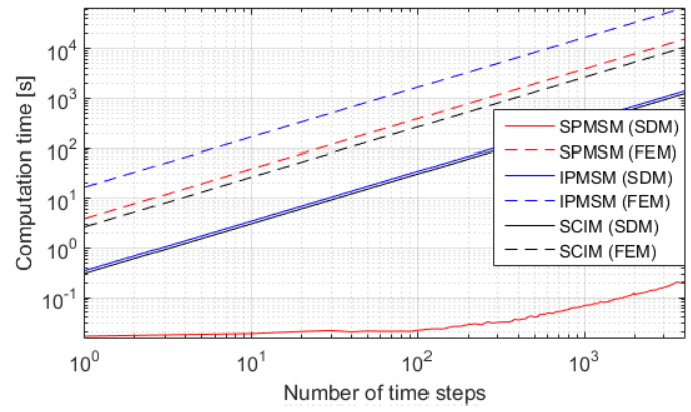
Computation time versus the number of time steps for each topology and each method
It can be seen that the subdomain method is always faster than FEA, especially for the SPMSM because a single system resolution is needed. For machine with double saliency (slots at stator and rotor sides), the computation time increases linearly in function of the number of time steps because there is one system resolution per time step (as for the FEM).
Method and Assumptions
The subdomain method is based on the analytical resolution of Maxwell equations, which is possible under several assumptions [[B. L. J. Gysen, K. J. Meessen, J. J. H. Paulides, and E. A. Lomonova, “General Formulation of the Electromagnetic Field Distribution in Machines and Devices Using Fourier Analysis,” IEEE Trans. Magn., vol. 46, no. 1, pp. 39–52, 2010.]]:
- The problem is divided into physical subdomains with polar or cartesian geometry, with uniform magnetic relative permeability and including a magnetic source (current density or magnet) or not (for air gap and slot openings). If the stator slots shape is not simple, the slot geometry is transformed into an equivalent polar shape. plot_sdm_geometry command enables to compare real and adapted geometry after the simulation.
- The problem is solved using a 2-D Magnetic Vector Potential (MVP) formulation in each subdomain, meaning 3-D effects such as end-effect or skewing are neglected (skewing can be implemented using a 2-D multi-slice model). The magnetic flux density B derives from the MVP A such as B=rot(A) and is therefore continuously known inside the subdomain (without any mesh discretization);
- The problem is solved at steady-state (Rotor mechanical speed Ω is constant) for each independent and successive time-step;
- Stator and rotor iron cores are infinitely permeable. Thanks to continuity equations, the tangential field is null at each iron interface (flux lines are orthogonal to the surface) which enables to set the iron cores as external boundaries of the problem. The MVP and the flux density distributions are consequently not known in iron cores and magnetic saturation is neglected.
Here is for example a subdomain model of a Surface-mounted Permanent Magnet Synchronous Machine (SPMSM) with 12 stator slots and 8 poles:
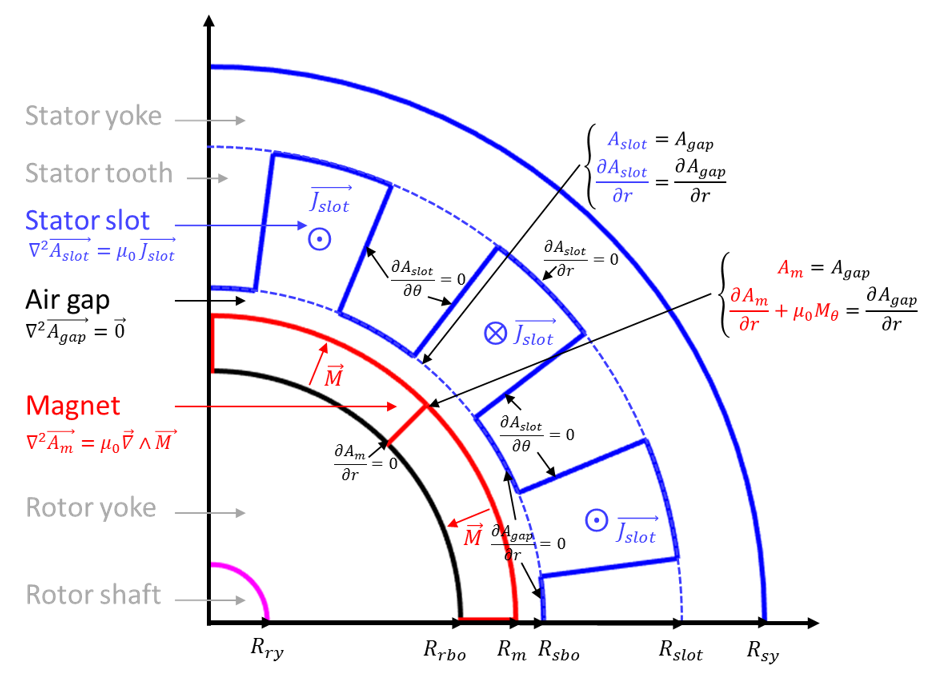
Subdomain model of a Surface-mounted Permanent Magnet Synchronous Machine (SPMSM)
In this example, the model is divided into:
- 1 magnets subdomain containing a magnet source,
- 1 air gap subdomain,
- 12 stator slots subdomains containing a current density source.
The resulting differential equations are Poisson’s equations in magnets and stator slots subdomains and Laplace’s Equation in the air gap (Step 1). Each differential equation is subject to the external iron boundary conditions represented on the figure above (i.e all equations with a null potential derivative). These iron boundary conditions enables to find an analytical solution using the separation of variables technique (Step 2 and 3). This potential solution is expressed as a Fourier series whose coefficients still depend on one or several integration constants. These integration constants are determined by applying the potential and tangential field continuity equations between the adjacent subdomains (Step 4).
There is one equation per harmonic rank and per integration constant, meaning that the system solve grows linearly with : (the number of subdomains)x(the number of harmonic considered in each subdomain) (see the Howto on the harmonic numbers computation). The resulting equation set is put under matrix form and is numerically solved (Step 5). Then, the flux density distribution is obtained by evaluating the Fourier series with the resulting integration constants values (Step 6). Others post-processings such as torque or Maxwell forces computation are made depending on the simulation project parameters (Step 7).
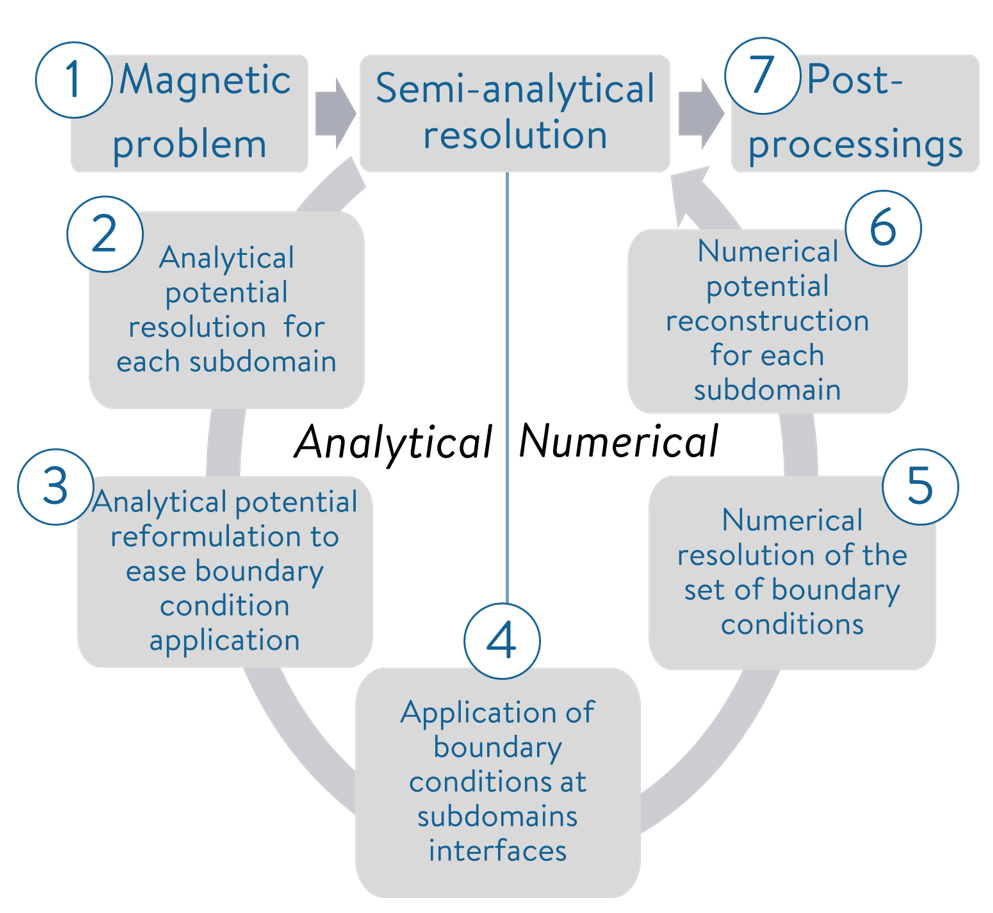
Methodology description of the semi-analytical subdomain method
Flux density results, comparison with MANATEE FEA (FEMM)
The air gap flux density is computed for this particular SPMSM under load operation and plotted using the plot_B_space command:

Flux density in the middle of the air gap (for SPMSM 12 slots/8 poles under load operation)
It shows that FEA and SDM results are almost the same, however the flux density is computed for 2000 time steps in less than a second with SDM, which is equivalent to a single time step using Finite Element Analysis. The MANATEE subdomain method is validated for numerous cases found in the litterature and shown on the validation part of the website.
The field lines and flux density can be plotted in each subdomain using plot_B_animate_SDM2D command:
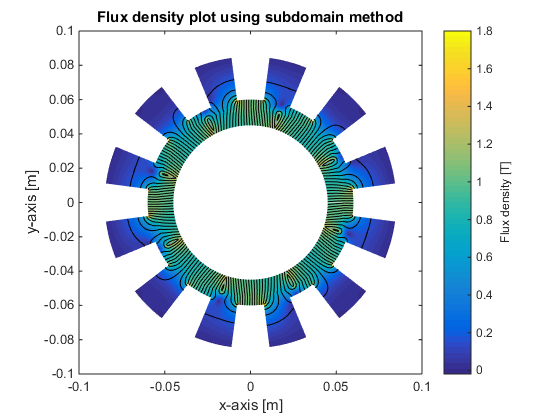
Flux lines plot using subdomain method (SPMSM 12 slots/8poles under load operation)
It can be seen that the flux lines enter perpendicularly into the iron parts, due to the infinite permeability assumption.